
人形機器人再添數億元融資!江蘇創企拿下,曾幫小米造機器狗
鳳凰科技 2024-12-26 01:35:12 2
作者 | 許麗思
編輯 | 漠影
機器人前瞻12月25日報道,今天,機器人前瞻從具身智慧機器人公司魔法原子(MagicLab)處獲悉,該公司近期完成了1.5億元天使輪融資,本輪融資由追創創投領投,翼樸基金跟投。
魔法原子於今年1月在北京成立,隨後成為全球首家以“電驅機器人”打破波士頓動力空翻專利的機器人公司。後來,公司遷移到了無錫,沉寂了半年多後,魔法原子在年底完成了自研人形機器人2到3個版本的迭代,及其在多個工業、商業場景的實訓——例如,一群人形機器人可以在家電製造工廠從事多樣化工作,還可以進行叢集式多機協作。
原子,從物理學角度來說,是人類社會的基本單元。而對魔法原子這家公司來說,他們也希望在未來,機器人可以在人類社會的眾多場景中成為像原子一樣的基本單元,完成各式各樣的任務。
在本輪融資之後,魔法原子計劃擴大人才招募,持續加碼具身智慧核心技術研發、人形機器人整機研發,並加快量產步伐、拓展工業及商業場景落地與商業化。
不久前,機器人前瞻和魔法原子負責產品技術研發的研發負責人吳長征進行了一場深度對話。從上海交通大學研究生畢業後,吳長征就一直從事機器人相關的研發工作,是中國最早一批參與到四足機器狗研發的人,此前曾在普渡機器人帶領團隊研發工作,後來加入了魔法原子。
在與他的對話中,我們深刻地感受到,這傢俱身智慧公司成長迅速的奧秘,正是對人形機器人落地場景的透徹體悟與精確把控。
一、參與小米機器狗研發後,走向自主品牌打造
2021年8月,在雷軍的年度演講上,一隻四足機器狗亮相了。這是小米的第一代仿生四足機器人 CyberDog,學名“鐵蛋”,會走路、奔跑、跳躍、打滾。
而這款機器狗的背後參與研發的團隊,正是魔法原子的創始團隊。

▲在2021年度演講上,雷軍攜手“鐵蛋”亮相
與此同時,團隊也在推動打造自主品牌的機器狗,並在兩個月後推出仿生四足機器狗Eame One,這款機器狗能完成爬坡、上樓梯、跨越障礙、後空翻、跳舞等高難度動作。
在研發四足機器狗的過程中,團隊積累了許多在模組、運動控制、人機互動和智慧演算法等方面的技術,在此基礎上進一步推進力人形機器人研發。2023年,團隊推出了第一代人形機器人,這款機器人全身具有44個自由度,能夠和人進行自然流暢的語言交流,也能完成單腿站立等複雜動作。
這個機器人還在2023年的世界機器人大會上,秀了一把咖啡拉花的絕技。
轉折點出現在2023年底。以大模型為代表的AI技術快速發展,也為具身智慧帶來了巨大的成長機遇。
團隊覺得,機器人產業蘊含著巨大的市場機會,再加上已經積累了一定的整機制作技術,於是開始謀求正式走向前臺,獨立發展。
2024年1月,魔法原子正式成立了。成立當月,魔法原子就釋出了一則人形機器人下半身翻跟斗的影片,這是全球首個電驅動空翻機器人。在這之前,唯一能做到是波士頓動力的液壓驅動機器人Atlas。
吳長征回憶,那個時候,特斯拉、宇樹、星動紀元、逐際動力等多家機器人公司都會展示各種各樣的機器人能力,團隊很容易被外界的進展吸引,再加上內部也遇上技術難點,也出現過迷茫時刻,所以明確未來的發展路線至關重要。
“最終我們明確了一點,就是希望人形機器人能夠真正走進千行百業,實現真正的價值,成為一個有用的機器人,所以我們要朝著通用機器人的方向去發展,先解決行走問題,再逐步突破至感知、理解、決策等方面。”吳長征說。
接下來,團隊沉澱了半年多,不斷迭代人形機器人MagicBot。
“MagicBot基本上實現了整機的自主研發,以核心零部件為例,我們自主研發了一系列關節模組執行器,覆蓋了所有運動關節,對於每個關節的控制效能、控制演算法和控制精度,我們都可以進行更好的打磨,”吳長征說,“這種打磨包括感測器佈置以及如何更好地獲取環境資訊等,再透過一系列實測調整到當前最優效果,也在定位建圖導航、環境理解上有所提升,這是幾個月來版本迭代實現的主要提升。”

▲人形機器人MagicBot
據瞭解,魔法原子目前團隊規模約100人,研發團隊核心成員多畢業於清華大學、上海交通大學、浙江大學、北京航空航天大學、紐約大學等國內外知名高校,在機器人、人工智慧演算法等領域從事核心技術研發工作多年,其中80%以上為研發人員,碩士以上學歷超過50%。
二、瞄準工業製造、商業服務,從場景裡找出路
儘管近來人形機器人在運動控制、感知能力、智慧互動等技術方面有了顯著進步,但如何進一步推動落地應用的問題依舊掣肘著人形機器人的發展,也容易讓人形機器人被打上“噱頭”“炒作”的標籤。
成立還不到一年但發展迅速的魔法原子,或許與其在人形機器人場景應用上精準把控有關。
面對落地應用場景挖掘這一機器人行業備受關注的核心問題,魔法原子在今年下半年將自家的機器人產品在追覓、福田康明斯等企業的工業智慧製造、商用服務等場景中落地實測,進行相應的資料採集和技能訓練工作。
在吳長征看來,魔法原子的優勢在於有著上述相對成熟的場景支撐。在這樣的基礎上,公司也將發展目標錨定在未來需要實現工業柔性自動化的產線,讓機器人實現操作、搬運、質檢等多工種任務,以及在商業服務中的應用。
“如何將技能固化為機器人本身的能力,才是真正有實際意義和價值的。”他說。
12月2日,魔法原子釋出了一則MagicBot進廠打工影片,影片中體現了兩大亮點:
一是機器人能夠完成多項工作任務。魔法原子為MagicBot自研了一系列關節模組執行器,覆蓋了550N.m以下的多種力矩需求,再加上已經可以模擬人手進行捏、抓、握、提拉等基本動作的靈活手部以及頭部視覺感測器、Magic Data AI資料引擎等的支援,機器人可以兼顧多樣化任務。
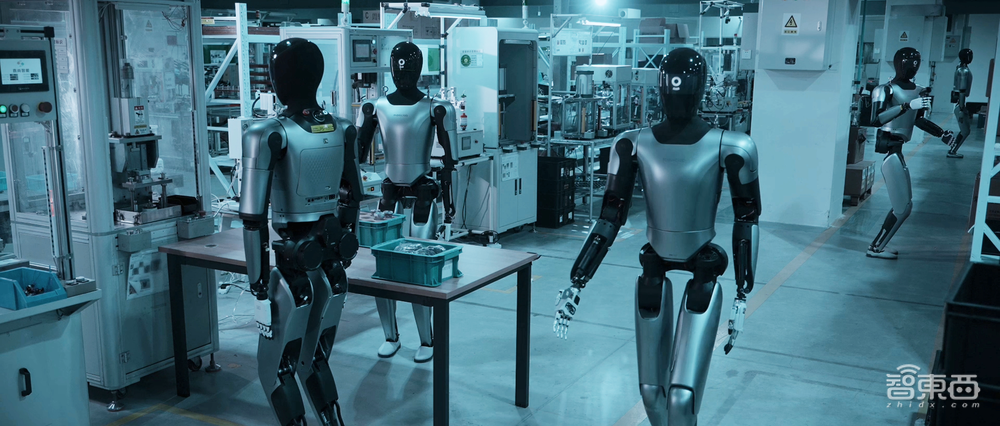
二是實現了多臺機器人的協同。從搬運貨物、擺放貨物、組裝產品再到檢測、打包檢測等一系列流程,是由多臺機器人同時協作的。
這是在MagicNet多機協同系統下進行的,以工廠場景為例,該系統可以收集並整理多臺人形機器人的環境感知資料,並實現多場景地圖的共享,並進行生產效率最佳的任務規劃和排程。如果人形機器人發生故障,該系統還將會指揮其他機器人接管或重新分配任務。
這些亮點意味著,機器人對複雜環境的適應度提高了,將能夠很好地應用到對精細化操作要求更高的柔性生產場景中。
▲在工廠中,多臺MagicBot正在協同作業
魔法原子也在商業服務領域展開了探索。
今年11月,機器人產業發展大會在蘇州舉辦。在這場大會上,MagicBot可謂是出盡風頭:作為大會唯一指定接待、全場唯一自由行走的人形機器人,MagicBot在現場可以主動識別到訪嘉賓,進行歡迎問候,並向嘉賓介紹大會相關資訊。同時,它還在會場為嘉賓指引主會場方向,並陪同入場。

▲在機器人產業發展大會上,MagicBot與觀眾進行互動交流
另外,該公司也開始了線上下零售門店應用的探索,例如讓MagicBot承擔導購功能,能對顧客進行售前引導、售中講解及售後服務等環節,幫助門店提升運營效率。
12月初,魔法原子與中國電信旗下天翼數字生活公司完成簽約,成為中國電信“美好家機器人生態共建計劃”機器人生態合作伙伴,共同探索家庭服務機器人技術的創新發展和應用落地。
而對於公司在四足機器人方面的業務,吳長征談道,不同於解決生產生活中實際問題的人形機器人,其四足機器人主要的是面向消費級使用者,定位於科研、娛樂陪伴領域。

▲魔法原子旗下四足機器人MagicDog
三、預計明年小規模量產,後年實現千臺交付
目前,在工業製造領域,協作機器人與複合機器人發展迅速,已經具有了較高的應用靈活性和成熟度。在這種情況下,讓人形機器人進入生產線完成流程化工作,是否會吃力不討好?
吳長征覺得,人形機器人始終有不同於自動化裝置的獨特優勢,特別是在實現柔性製造方面。例如針對家電製造和3C製造環節,產品更新迭代非常快速且對精細化操作要求高,如果每次進行生產新產品的時候就需要對自動化裝置進行更新,會導致成本的大幅增加。
在這種情況下,人形機器人由於形態和能力最接近人,可以很好地適應柔性生產且部署成本低,能夠靈活應對市場變化。
在魔法原子的發展規劃裡,團隊將人形機器人的場景落地分為M0-M4五個階段:M0是實驗室場景,M1是人形機器人能在特定工業商業場景裡實踐單一節能;M2同樣式在特定工業商業場景中,不過人形機器人的技能更多樣化了;M3是已經進入家庭,具有陪伴等功能;M4則是真正一機多用的通用機器人。
現在,魔法原子的人形機器人還處於M1向M2進化的過渡階段。不過,吳長征提到,目前邁向M2階段最難的還是在資料以及利用資料進行機器人技能訓練方面。他預計,在接下來兩年左右時間,魔法原子能夠實現從M1到M2的較為顯著的突破。
吳長征還談道:“魔法原子已具備機器人‘大腦、小腦和肢體’全面的技術矩陣和持續研發能力。此次融資後,魔法原子將進一步加強核心演算法研發,重點突破運動控制演算法、感知演算法、具身模型等關鍵技術;提升供應鏈效率,打造人形機器人本體的生產製造能力,在實現成本可控的基礎上,打造穩定、可靠、成熟的量產人形機器人產品。”
據瞭解,明年一季度,魔法原子將正式釋出新一代人形機器人產品MagicBot,並預計於2025年交付數百臺量產版MagicBot,2026年交付量將達到千臺級別。
結語:尋找技術創新與落地實踐的平衡點
具身智慧賽道火熱,在資金、人才和技術等方面擁有顯著優勢的大廠們紛紛入局,而對正在成長中的中小企業來說,哪裡會是更大的機會?
吳長征直言,現在整個具身智慧行業還沒有對技術達成共識,所以機會對於任何人來說都是平等的。針對中小企業,一方面可以聚焦於垂直應用或技能拓展,讓機器人產生實際價值;另一方面,家庭、製造業場景廣闊,市場和行業規模龐大,中小企業在此也大有可為,有諸多機會等待挖掘與開拓。
高度關注人形機器人在場景裡的應用,這大概是如今的機器人熱潮區別於上一波最顯著特點,也是機器人發展過程中里程碑式的變化。
對魔法原子來說,他們選擇的就是面向場景,在技術創新與落地實踐之間尋找平衡點,一步步邁向規模化應用。
相關文章
- 李想:理想汽車100%會做人形機器人,不想涉足Robotaxi
- 小米Poco X7、Pro手機規格及外觀圖曝光:天璣7300、8400,搭50MP主攝1.5K 120Hz面板
- 人形機器人再添數億元融資!江蘇創企拿下,曾幫小米造機器狗
- 小米申請新車YU7商標:為明年6、7月量產上市做準備!
- 湯姆貓推出AI童伴機器人:支援主動聊天、情緒識別,1499元起
- 訊息稱小米新品搭載等效12000mAh電池及120W快充
- 宇樹科技B2-W工業輪足機器狗大秀技能:上山下水、側空翻無所不能
- 這家深圳公司,5個月造出第四款鋼鐵俠機器人
- AI同時操控200個機器人,任務成功率超90%,半數故障依然“能打”
- OpenAI直播12天,馬斯克融資437億