
Waymo利用谷歌Gemini大語言模型,開發端到端自動駕駛模型
鳳凰科技 2024-11-01 01:34:38 5
IT之家 10 月 31 日訊息,自動駕駛公司 Waymo 長期以來一直將與谷歌 DeepMind 的聯絡及其數十年的 AI 研究視為其在自動駕駛領域超越競爭對手的戰略優勢。現在這家 Alphabet 旗下的公司更進一步,為其機器人計程車開發一種基於谷歌多模態大語言模型(MLLM)“Gemini”的新訓練模型。

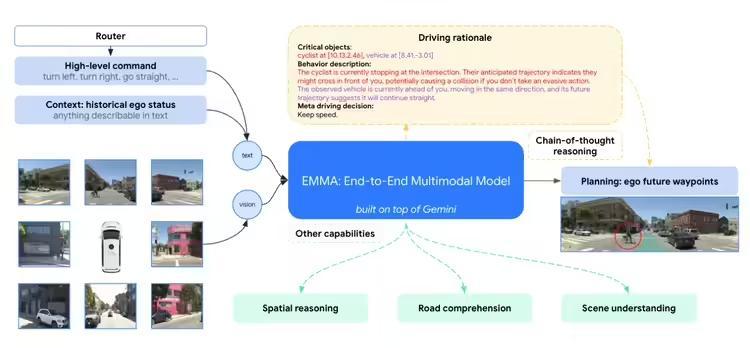
Waymo 今天釋出了一篇新的研究論文,介紹了一種名為“端到端多模態自動駕駛模型”(EMMA)的新模型。這種新的端到端訓練模型能夠處理感測器資料,生成“自動駕駛車輛的未來軌跡”,幫助 Waymo 的無人駕駛車輛做出關於去哪裡以及如何避開障礙物的決策。
但更重要的是,這是首次有跡象表明,自動駕駛領域的領導者計劃將 MLLM 應用於其業務。這意味著 MLLM 可能不僅僅侷限於聊天機器人、電子郵件組織者和影象生成器等領域,而是可以擴充套件到自動駕駛領域。
在研究中 Waymo 提出,傳統的自動駕駛系統通常會為感知、對映、預測和規劃等各種功能開發特定的“模組”。雖然這種方法在過去多年中效果顯著,但也存在可擴充套件性問題,主要是由於模組間的誤差積累和通訊有限。此外,這些模組由於是“預定義”的,因此面對“新環境”時適應能力較差。
Waymo 認為,像 Gemini 這樣的 MLLM 可以解決這些問題。首先,這些模型是經過大量網際網路資料訓練的“通才”,能提供超出常規駕駛記錄的豐富“世界知識”;其次,它們透過“鏈式推理”等技術展現出“卓越”的推理能力,能夠將複雜任務分解為一系列邏輯步驟,模仿人類的思維方式。
Waymo 表示,EMMA 模型在幫助機器人計程車應對複雜環境方面表現良好。例如,當遇到各種動物或道路施工時,EMMA 能夠幫助無人駕駛汽車找到合適的行駛路線。
IT之家注意到,特斯拉等其他公司也在大力開發其自動駕駛汽車的端到端模型。特斯拉執行長埃隆・馬斯克聲稱,最新版本的 FSD 12.5.5 採用了“端到端神經網路”人工智慧系統,將攝像頭影象轉換為駕駛決策。
這表明,在部署真正的無人駕駛車輛方面領先於特斯拉的 Waymo 也對追求端到端系統感興趣。該公司表示,其 EMMA 模型在軌跡預測、物體檢測和道路圖理解方面表現出色。
但 EMMA 也有其侷限性,Waymo 承認,在將該模型投入實踐之前,還需要進行未來的研究。例如,EMMA 無法整合來自鐳射雷達或雷達的 3D 感測器輸入,Waymo 表示這是因為“計算開銷太高”,並且一次只能處理少量影象幀。
研究論文中未提及的另一個風險是,像 Gemini 這樣的 MLLM 會存在“幻覺”,而無人駕駛汽車的容錯率非常有限。因此,在這些模型能夠大規模部署之前,還需要進行更多研究。
相關文章
- 任天堂Switch 2遊戲機模型機曝光:直觀展示8英寸螢幕及磁性Joy-Con手柄
- AI無處不在:谷歌將為Chrome瀏覽器增強保護模式引入人工智慧
- 華為鴻蒙OS第三季度份額增至15%:與蘋果iOS、谷歌安卓三分天下
- 受谷歌Pixel 9衝擊,9月以來蘋果iPhone在美國市場份額明顯下滑
- 谷歌推出安全分析AI工具Big Sleep,實戰告捷抓出SQLite堆疊緩衝區下溢漏洞
- 谷歌Tensor G5晶片跑分曝光:1+5+2叢集設計、升級GPU,多核跑分4004分
- NVIDIA、微軟、谷歌等搶破頭!臺積電CoWoS封裝要漲價20%
- 微軟AI主管談AI趨勢:大小模型將“齊頭並進”,“規模法則”遠沒有到極限
- 華西醫院聯合華為資料儲存釋出“華西黌醫”醫學大模型:整合10餘類通用模型和50餘類垂域模型
- 蘋果AI研究:“獼猴桃”簡單算術考倒o1和Llama等20多個最先進模型